화낙 CNC에서 200개가 넘는 상태값을 뽑아오고
프로그램을 백업하거나 복구하는 프로그램입니다.
단독형, 서버형, MES(POP) with CNC 형태로 구성가능합니다


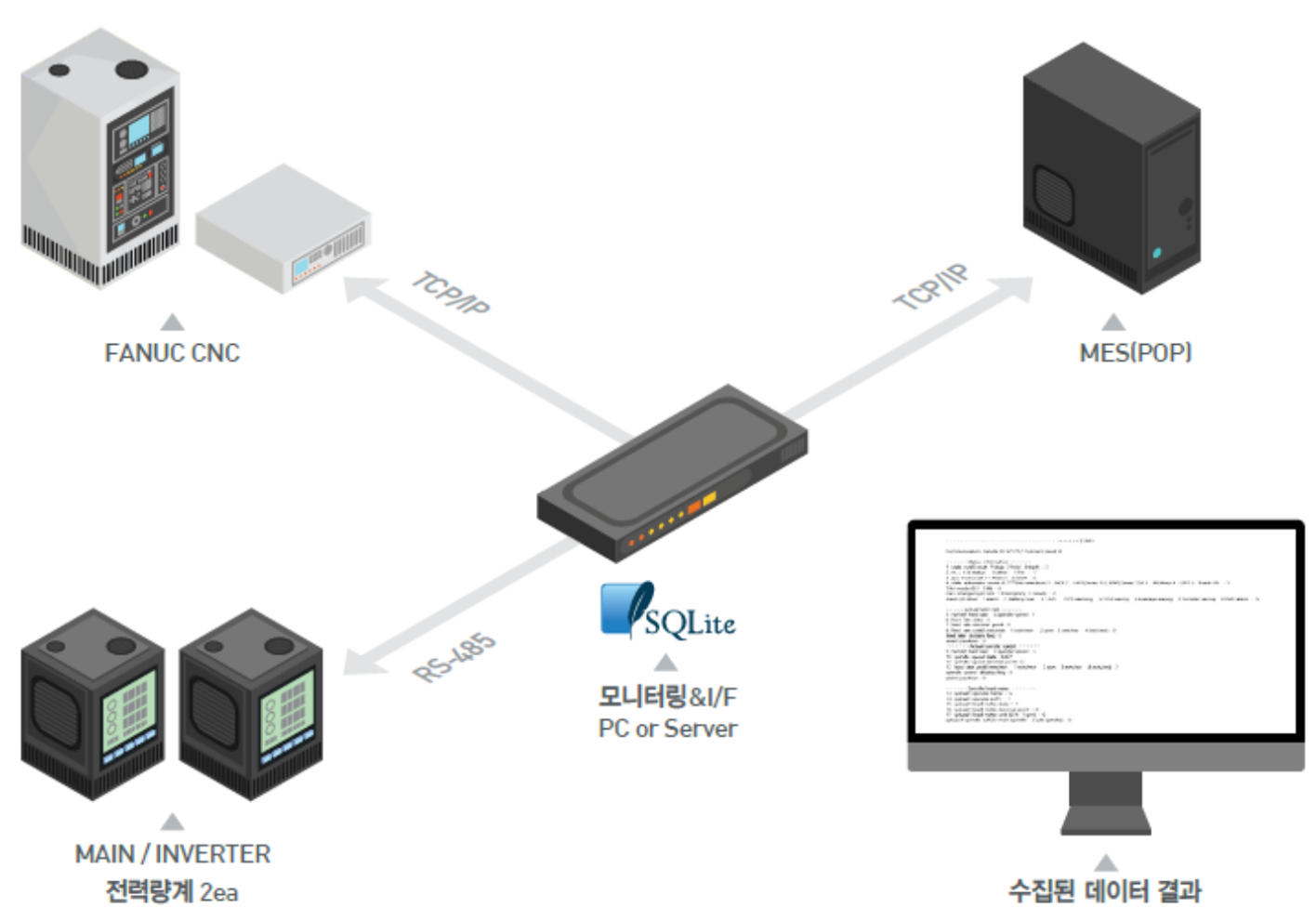
CNC 운영정보와 함께 전력량계를 통한 전압/전류/주파수 정보를 파악하여
추가적인 분석에 활용 가능합니다.
수집데이터 샘플입니다.
======Statusinformation======
state run(0.reset 1.stop 2.hold 3.start) = 3
m,s,t,b status 0.other 1.Fin = 1
axis motion(0.? 1.Motion 3.Dwell = 0
state automatic mode 0: ****(Noselection)1 : MDI 2 : TAPE(Series 15),DNC(Series15i) 3 : MEMory4 : EDIT 5 : TeacHIN = 1
T/Mmode(0.T 1.M) = 0
max emergency(0.Not 1.Emergency 2.Reset) = 0
Alarm(0.other 1.alarm 2. Batterylow 3. FAN 4.PS warning 5.FSSB waring 6.Leakage waring 7.Encoder waring 8.PMC alarm= 0
=====Actualfeedrate======
name(F.feedrate S.Spindlespeed: F
feed rate data: 0
feed rate decimal point: 0
feed rate unit(0.mm/min 1.inch/min 2.rpm 3.mm/rev 4.inch/rev): 0
feed rate display flag: 0
select position: 0
====== Actualspindlespeed ======
name(F.feedrate S.Spindlespeed: S
spindle speed data: 3467
spindle speed decimal point: 0
feed rate unit(0.mm/min 1.inch/min 2.rpm 3.mm/rev 4.inch/rev): 2
spindle speed display flag: 1
select position: 0
======Spindleloadmeter=======
spload1 spindle name= S
spload1 spindle suff1 = 1
spload1 load meter data= 1
spload1 load meter decimal point= 0
spload1 load mete runit(0.% 1.rpm) = 0
spload1 spindle suff2(1.main spindle 2.sub spindle)= 0
======Spindlemotorspeed=======
spload1 spindlename= S
spload1 spindle suff1 = 1
spload1 motor speed data= 3498
spload1 motor speed decimal point= 0
spload1 motor speed unit(0.% 1.rpm) = 1
spload1 spindle suff2(1.main spindle 2.sub spindle)= 0
======Position information =======
p1 name X
p1 absolute position 0 / decimal 3 / unit(0. mm 1.inch 2.degree) 0
p1 machine position -132680 / decimal 3 / unit(0. mm 1.inch 2.degree) 0
p1 relative position -132677 / decimal 3 / unit(0. mm 1.inch 2.degree) 0
p1 distance position 0 / decimal 3 / unit(0. mm 1.inch 2.degree) 0
p2 name Y
p2 absolute position 0 / decimal 3 / unit(0. mm 1.inch 2.degree) 0
p2 machine position -136330 / decimal 3 / unit(0. mm 1.inch 2.degree) 0
p2 relative position -72313 / decimal 3 / unit(0. mm 1.inch 2.degree) 0
p2 distance position 0 / decimal 3 / unit(0. mm 1.inch 2.degree) 0
p3 name Z
p3 absolute position 13210 / decimal 3 / unit(0. mm 1.inch 2.degree) 0
p3 machine position -334550 / decimal 3 / unit(0. mm 1.inch 2.degree) 0
p3 relative position -334276 / decimal 3 / unit(0. mm 1.inch 2.degree) 0
p3 distance position 0 / decimal 3 /unit(0. mm 1.inch 2.degree) 0
==================Servo load meter ==================
Read Point Number (unit %) = 3
Servo 1 name / data / decimal point = X / 3 / 0
Servo 2 name / data / decimal point = Y / 1 / 0
Servo 3 name / data / decimal point = Z / 51 / 0
==================All dynamic data ==================
main program number = 3
current program number = 3013
current sequence number = 13
axis= -1
actual feed rate = 0
actual spindle speed = 3465
alarm status = 0
absolute position 0 = 0
absolute position 1 = 0
absolute position 2 = 13210
absolute position 3 = 0
absolute position 4 = 0
absolute position 5 = 0
absolute position 6 = 0
absolute position 7 = 0
absolute position 8 = 0
absolute position 9 = 0
absolute position 10 = 0
absolute position 11 = 0
absolute position 12 = 0
absolute position 13 = 0
absolute position 14 = 0
absolute position 15 = 0
absolute position 16 = 0
absolute position 17 = 0
absolute position 18 = 0
absolute position 19 = 0
absolute position 20 = 0
absolute position 21 = 0
absolute position 22 = 0
absolute position 23 = 0
absolute position 24 = 0
absolute position 25 = 0
absolute position 26 = 0
absolute position 27 = 0
machine position 0 = -132680
machine position 1 = -136330
machine position 2 = -334550
machine position 3 = 28941
machine position 4 = 28941
machine position 5 = 0
machine position 6 = -333684727
machine position 7 = 2228224
machine position 8 = 52166656
machine position 9 = 52064525
machine position 10 = 51933453
machine position 11 = 2257165
machine position 12 = 151941389
machine position 13 = 343277568
machine position 14 = 759431440
machine position 15 = 2490368
machine position 16 = 16777216
machine position 17 = 196608
machine position 18 = 196608
machine position 19 = 225549
machine position 20 = 94476
machine position 21 = 16908288
machine position 22 = 65536
machine position 23 = 65536
machine position 24 = 94476
machine position 25 = 206336269
machine position 26 = -505908980
machine position 27 = -1859358452
machine position 28 = -501469176
machine position 29 = 0
machine position 30 = 0
machine position 31 = 235143168
relative position 0 = -132677
relative position 1 = -72313
relative position 2 = -334276
relative position 3 = 78337
relative position 4 = 12802
relative position 5 = 4236
relative position 6 = 196609
relative position 7 = 266380
relative position 8 = -502787958
relative position 9 = -145752064
relative position 10 = 15601802
relative position 11 = 173281418
relative position 12 = -500695040
relative position 13 = -1896083318
relative position 14 = -501219056
relative position 15 = 2490368
relative position 16 = 16842749
relative position 17 = 262141
relative position 18 = 262138
relative position 19 = 225549
relative position 20 = 94476
relative position 21 = 16908288
relative position 22 = 65536
relative position 23 = 65536
relative position 24 = 94476
relative position 25 = 206336269
relative position 26 = -505908980
relative position 27 = -1859358452
relative position 28 = -501469176
relative position 29 = 0
relative position 30 = 0
relative position 31 = 235143168
distance to go 0 = 0
distance to go 1 = 0
distance to go 2 = 0
distance to go 3 = 0
distance to go 4 = 0
distance to go 5 = 0
distance to go 6 = 0
distance to go 7 = 0
distance to go 8 = 0
distance to go 9 = 0
distance to go 10 = 0
distance to go 11 = 0
distance to go 12 = 0
distance to go 13 = 0
distance to go 14 = 0
distance to go 15 = 0
distance to go 16 = 0
distance to go 17 = 0
distance to go 18 = 0
distance to go 19 = 0
distance to go 20 = 0
distance to go 21 = 0
distance to go 22 = 0
distance to go 23 = 0
distance to go 24 = 0
distance to go 25 = 0
distance to go 26 = 0
distance to go 27 = 0
distance to go 28 = 0
distance to go 29 = 0
distance to go 30 = 1079574528
distance to go 31 = 0
댓글
댓글 쓰기